

基于Dragonboard 410c实现科大讯飞麦克风阵列模块的语音唤醒控制及US-100超声波...。
基于Dragonboard 410c实现科大讯飞麦克风阵列模块的语音唤醒控制及US-100超声波应用
前言:本文主要是针对没有接触过Dragonboard 410c开发板的朋友,教大家如何从裸板搭建平台和通过这一个平台如何去实现科大讯飞麦克风阵列模块的语音唤醒控制以及US-100超声波的实际应用,总而言之通过这一个过程我相信大家可以更进一步的体验到Dragonboard 410c开发板的乐趣了。
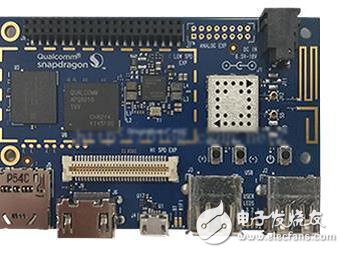
摄像头:支持1300万像素摄像头,硬件支持小波降噪、JPEG解码和其他硬件后处理技术;
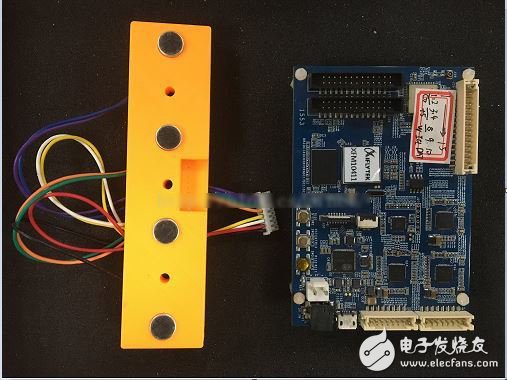
它是一款基于4麦克风阵列的语音硬件前端方案, 利用麦克风阵列的空域滤波特性,在目标说话人方向形成拾音波束,抑制波束之外的噪声和反射声。 模块基本功能是完成 4 麦克风阵列、降噪、回声消除、语音唤醒等语音前端处理,输出降噪后的音频信号、声源角度数据、唤醒触发信号、通讯等。
本模块有 3 个接口器件 J26、 J21 和 J22;其中 J26 上包括电源接口、 I C 通讯接口、唤醒信号、音频输出等。 J21 是麦克风阵列的接入接口, J22 是回声消除参考信号的接入接口。
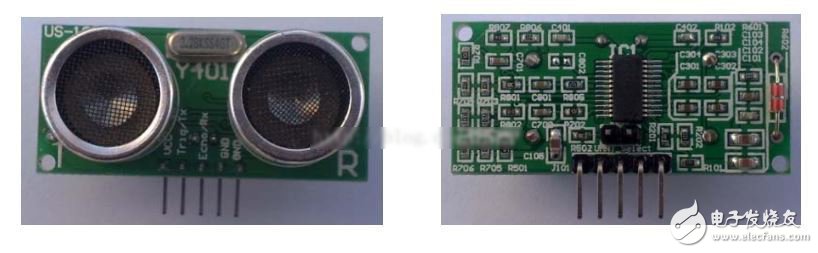
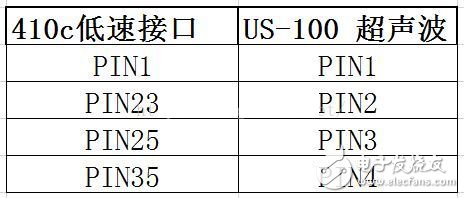
US-100超声波测距模块可实现 2cm~4.5m 的非接触测距功能,拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温度传感器对测距结果进行校正,同时具有 GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
2号 Pin: 当为 UART 模式时, 接外部电路 UART 的 TX 端;当为电平触发模式时,接外部电路的 Trig 端;
3号 Pin: 当为 UART 模式时, 接外部电路 UART 的 RX 端;当为电平触发模式时,接外部电路的 Echo 端;
基于Dragon Board410c与科大讯飞麦克风阵列模块的语音唤醒控制以及US-100超声波的实际应用镜像文件
2.我们可以借鉴以下链接安装镜像,待硬件连接好后,我们启动安装好的系统后,打开测试软件即可测试以下;
声源定位:模块可以准确给出说话人的方位,定位信息提供给麦克风阵定录音波束;
语音唤醒:模块预定的语音唤醒词是“灵犀 灵犀”,唤醒后通过模块的 WAKEUP 接口输出高电平给用户上位机;
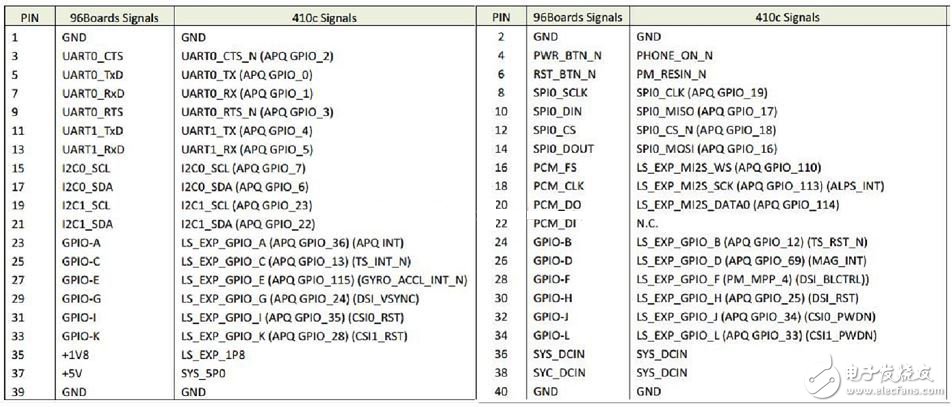
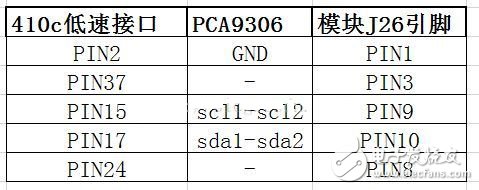
Dragonboard 410c开发板的低速接口通过PCA9306双向电平转换器连接到麦克风阵列模块的J26引脚上:
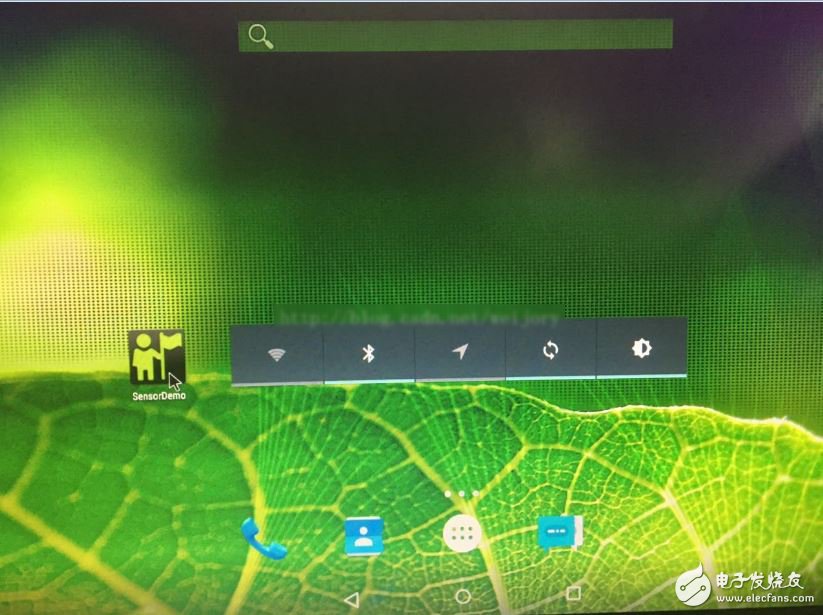
1.完成一、二后,通电进入系统,打开桌面上的sensor_demo APP,如下图
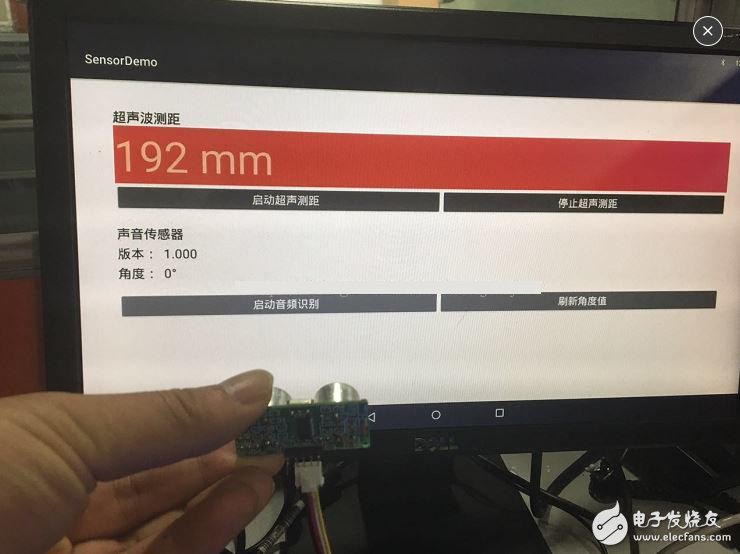
3.同上点击启动音频识别按钮,就能轻松实现语音唤醒屏幕(在息屏的前提下,从任意方向超语音识别模块讲“灵犀灵犀”的关键词就会唤醒屏幕以及能够检测到讲话人语音的角度以及距离),如图:
kaiyuntiyu成立于2004年,kaiyuntiyu自创办以来以软件和硬件开发相结合,为广大客户的各类电子产品提供完整的设计方案和PCBA的生产配套,形成一套完整的服务体系。